
テクノ雑学
第156回 冬山レジャーで活躍する4輪駆動車のメカニズム

そろそろ東京でも雪が降っておかしくない季節になりました。降雪地域の生活の足として、また冬山レジャーに出かける際の移動手段として、「4輪駆動」と呼ばれるタイプの自動車が活躍する時期です。今回は、略称で「4駆(よんく)」や「4WD」と呼ばれる、4輪駆動車のメカニズムについて説明してみたいと思います。
自動車の基本構造をみてみよう!
一般的な自動車は、車体の前方と後方、それぞれの左右端に1本ずつ、合計4本の車輪を備えています。このうち、自動車を前進させるための力を路面に伝える役割を持つ車輪を「駆動輪」、進行方向を変える役割を受け持つ車輪を「操舵輪」と呼びます。
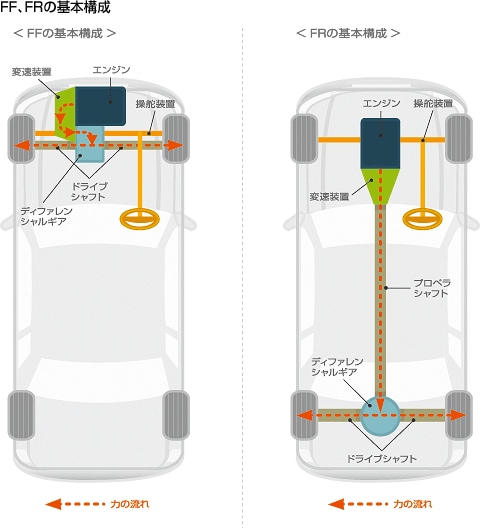
現在の一般的な乗用車は、すべて前2輪が操舵輪となっています。駆動輪についてはさまざまですが、中型以下の乗用車は、エンジンを車体の前部に搭載し、その力を前2輪に伝えて回転させることで走行する「前輪駆動」方式が主流です。このような構造を持つ自動車は、Front wheel drive、もしくはFront engine-Front wheel driveの頭文字を取って「FWD」「FF」とも呼ばれます。
これに対して、後2輪が駆動を受け持ち、前輪は操舵のみを受け持つ「後輪駆動」の自動車もあって、こちらはRear wheel drive、もしくはFront engine-Rear wheel driveの頭文字を取って「RWD」「FR」などと呼ばれます。FR方式を採用するのは、スポーツカーや大型の高級車が中心です。ほかにも、車体の後端部にエンジンを搭載して後輪を駆動する「RR=Rear engine-Rear wheel drive」方式や、車体の中央部にエンジンを搭載し、後輪を駆動する「MR=Mid engine-Rear wheel drive」などがあります。現在の市販車でRR方式を採用するのは、かの有名なポルシェ911、SMART、三菱iなどごく少数です。MRは「ミッドシップ」とも呼ばれ、フェラーリの一部車種など、いわゆるスーパーカーの類が採用しています。
なぜ、こんなにも多くの方式があるのかといえば、その自動車の設計コンセプトに応じた「パッケージング」が与えられるからです。パッケージングとは、自動車の設計において、「車体のどの部分にどのような姿勢で乗員を座らせるか?」「どんな部品をどこに、どうやって配置するか?」といった、基本構造を決める作業と、その結果として実現した構造を指す言葉です。ごく一般的な乗用車に求められる要素は、広い室内空間、それなりの走行性能、高い安全性、購入しやすい価格であることなどですから、当然、その目的に沿ったパッケージングが行われます。
■ 燃費向上や居住性重視によって浸透したFF方式
乗用車が普及を始めた当初から1970年代頃までは、FR方式が主流となっていました。自動車は走行中、常に車体の姿勢を変化させており、この姿勢変化がタイヤと路面の接している面(接地面)の状態を変化させます。たとえば、加速すると車体の後端部が沈み込むような姿勢になりますから、後輪のタイヤ接地面にかかる荷重が大きくなり、路面との摩擦が大きくなってタイヤがしっかりグリップします。昔の自動車がFR方式を採用していたのは、この動きによる荷重変化によって、安定した駆動力を確保する意味が大きいと言われています。当時はタイヤの性能が低かったことも大きく影響しています。操舵輪が前輪なのは、わざわざ後輪で操舵する機構を採用するメリットがなかったため、自然と受け継がれてきた事柄です。現在でも高級車やスポーツカーがFR方式を採用するのは、後輪駆動によって得られる、駆動性能や乗り心地の向上というメリットを求めての措置です。
流れが変わったのは1970年代の半ば以降です。世界的な排気ガス成分規制や、オイルショックによる燃料価格の高騰によって、乗用車には高い燃費・環境性能が求められるようになります。それを達成するためには、エンジン自体の性能向上とともに、車体の軽量化が必要です。FR方式の場合、エンジンからの出力を後輪に伝えるために「プロペラシャフト」という長い回転軸を使いますが、これは非常に重い部品なので、なくしてしまえば軽量化に大きく貢献できます。また、プロペラシャフトをなくせば、その分、車室内へのでっぱりが小さくできるので、車体のサイズに対する居住空間の割合を大きく取ることも可能になります。当時はラジアルタイヤが普及を始め、前2輪だけで操舵と駆動の両方をこなせる能力が実現できてきたことに加え、駆動力を伝える機構も洗練されてきたことから、乗用車のFF方式化が一気に進むことになりました。
■ 駆動力を最大限に生かす4輪駆動
さて、4輪駆動はその名の通り、前2輪と後2輪の両方にエンジンの出力を伝えて駆動するメカニズムで、これも路面に有効な駆動力を安定して伝える仕組みとして開発されたものです。たとえば、エンジンが100の力を発生するとします。FFやFRでは、直進状態で2個の駆動輪が50ずつの力を路面に伝えなければなりません。タイヤ接地面が50の力を受け止められる状態なら問題ありませんが、未舗装路などで50以下の力しか受け止められない場合は車輪が空転してしまい、安定性が損なわれます。また、FFでカーブを曲がる場合、前輪は操舵→旋回のために力を使わなければならないので、この場合も50の力をすべて使うことはできなくなります。それに対して4輪駆動なら、一つの車輪が路面に伝える力は25ずつで済みますから、路面の状態が悪い場合でも有効な駆動力を確保しやすくなるわけです。すべてのタイヤで駆動するので、車体姿勢の変化による荷重変動に対しても、駆動力の変動は少なくなります。また、4輪すべてが駆動を受け持つことで、直進/旋回時だけではなく、ブレーキング時にも車体の安定性が高まる利点もあります。
世界で初めて4輪駆動を採用した乗用車は、ポルシェの創業者であるフェルディナント・ポルシェ博士が1900年頃に作った「ミクステ」と呼ばれる世界初のハイブリッド自動車といわれています。ミクステは発電専用のエンジンで発電機を作動させ、発生した電力を4輪それぞれの内部に備える駆動用モータに伝えて走行する4輪駆動車でした。ガソリンエンジンを搭載する自動車では、1902年にオランダのスパイカー兄弟が作った「SPYKER」が初の4輪駆動車といわれています。SPYKERは、当時としては非常に高性能な直列6気筒エンジンを搭載していました。その高い出力を有効に路面に伝えるため、4輪すべてで駆動するメカニズムを開発したと伝えられています。
■ 軍事用やクワトロ・システムで一気に普及
4輪駆動車の普及を促進する大きな契機の一つとなったのが、軍事用車両への採用です。戦地では急勾配の山岳路や泥濘地など、車輪が空転しやすい路面でも確実に走行しなければならないことから、4輪駆動(以下、4WD)の採用が進みます。SPYKER発表の翌年である1903年には、ダイムラー社が4WDの装甲車を製作し、その後1934年には日本陸軍の「九五式小型自動車(くろがね四起)」、1938年にはドイツでフォルクスワーゲン・ビートルをベースとした「キューベルバーゲン」、そして1941年にはアメリカで「ジープ」が開発され、偵察や伝令などの任務に用いられます。これらの軍用車両によって、4WDはラフロード走行用の自動車の定番メカニズムとして定着していきました。現在のSUV(Sports Utility Vehicle)などと呼ばれるジャンルの自動車は、これら軍用車両から発展していったオフロード走行用車両をベースに、乗用車としての快適性を盛り込んだもので、ジープを連想させる形のものが多い理由の一つです。
もう一つの大きな契機となったのが、1980年にアウディが発表した「クワトロ・システム」と呼ばれる4WDメカニズムです。それまでの4WDは、前2輪と後2輪の回転数が常に等しくなる「直結4WD」でした。しかし、カーブを曲がる時などは、4輪それぞれが通る軌跡と距離が異なりますから、基本的には前輪外側、後輪外側、前輪内側、後輪内側の順でたくさん回転しなければうまく曲がることができません。FRの後輪やFFの前輪は、左右の車輪を等しく回転させる車軸(ドライブシャフト)でつながっていますが、その上で回転数の差を許容する「差動装置(ディファレンシャルギア)」によって、右の車輪と左の車輪で回転数が違う状態を可能としています。しかし、直結4WDの前後輪間には、そのような仕組みがありません。そのため、特に曲率が小さいカーブを曲がる時、後輪の少ない回転数が前輪の抵抗となってスムーズに曲がれない「タイトターンブレーキング現象」と呼ばれる問題が生じてしまいます。
この問題を避けるため、直結4WD車のほとんどは、通常はFR状態で走行し、必要な時だけ4WD状態とする「パートタイム方式」となっていました。4WDへの切り替えは、車輪を車体に接合する「ハブ」という部品の構造を工夫してドライブシャフトを空転状態にしたり、出力を前後に分割する「トランスファー(パワー・テイクオフ・ユニットなどとも呼ばれる)」部に備えたクラッチの断続などで対応します。必要な時だけ4WDになることから「パートタイム式4WD」などと呼ばれます。
これに対して、アウディのクワトロ・システムは常に4輪に駆動力を伝える「フルタイム4WD」方式です。エンジンの出力が伝わっていく経路の途中に、前後輪間の回転差を許容する「センターディファレンシャルギア」と呼ばれる機構を採用したことで、常時4輪駆動を実現しました。開発の目的は、新しい形の高性能車を実現することにありました。当時は排ガスや燃費への対応が一段落し、ターボ過給の普及などによって、エンジンの出力がどんどん向上していった時期です。しかし、タイヤの性能がそれに追い付いていない感があり、せっかくの高出力が有効に使えなかったことへの対策として4WDに注目したのです。
わかりやすく言うと、従来の4WDが「エンジンが生み出す100の力を、4輪それぞれが25ずつ使う」ことでタイヤ接地面の余力を生み、走破性を向上させていたのに対し、クワトロ・システムは「200の力を出すエンジンに対応するため、4輪がそれぞれ50ずつ受け止める」ことで自動車自体の性能を高める4WDシステムだったのです。その効果は絶大なもので、当時の世界ラリー選手権では連戦連勝を記録し、オフロード走行以外でも4WDによる大きなメリットを実証してみせました。
■ オン・デマンド式で高性能&エコ
クワトロ・システムに触発され、1980年代から1990年代にかけては、世界中の自動車メーカーがフルタイム4WD車を開発しました。現在でもスバルなどがフルタイム4WDのメリットをアピールしていますが、1990年代末頃から少し流れが変わり、現在の乗用車では「オン・デマンド式」と呼ばれる4WDメカニズムが主流となっています。
フルタイム4WDは走行性能全般を大きく高めてくれる反面、部品が増えることによる重量増加や、駆動に伴う抵抗や損失の増大によって、燃費性能に悪影響を及ぼしがちです。
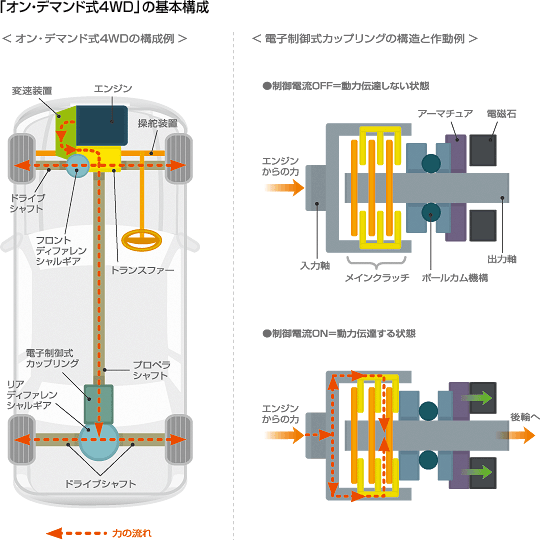
また、一部の地域を除けば、一般的な乗用車は基本的に舗装路を走るものであって、そのために必要な能力はFFでも十分に備えています。そこで、日常的な走行はFFでこなして燃費を向上させ、路面状況が前2輪では対応できない場合だけ、自動的に後輪にも駆動力が伝わるような仕組みが考案されました。「必要に応じて、自動的に」4WDになるので「オン・デマンド式」と呼ばれています。構造はさまざまですが、国産車では「電子制御式カップリング」を用い、前輪と後輪に伝わる力を100:0から50:50まで、リニアかつリアルタイムに変更可能なタイプが主流です。
実は、高性能車の代表格である日産GT-Rも、電子制御カップリングによるオン・デマンド式4WDを採用しています。基本はFRで素直な操縦性を実現し、ハイスピードコーナリングや急加速など、後輪だけでは対処が難しい状態のみ前輪でも駆動することで、絶対的な走行性能を高めることが、採用の目的となっています。
ただし、4WDが走行性能を高めてくれるとはいえ、過信は禁物です。冬場のスキー場近辺では、下り坂で事故を起こしているSUVが目に付く傾向があり、そのほとんどが他府県ナンバーです。筆者にも経験がありますが、雪道の運転に不慣れなドライバーが4WDで走行すると、意外にしっかりと走り、曲がることに感動するものです。しかし、そのことで油断し、下り坂でも舗装路と同じようなタイミングと強さでブレーキングをしてしまうと、最悪の場合は事故に至ってしまうことになります。オン・デマンド式4WDであっても部品増加分は車重が増えますし、また一般的にSUVは車体が大柄で、この点でも車重が増えます。その上に路面の摩擦が少ない状態では、いくら4WDとはいえブレーキ性能が大きく低下してしまうからです。これからスキー場などへ4WD車で出かける方は、くれぐれも4WDの能力を過信せず、安全運転に徹して無事なご帰宅を心がけていただきたく思います。
著者プロフィール:松田勇治(マツダユウジ)
1964年東京都出身。青山学院大学法学部卒業。在学中よりフリーランスライター/エディターとして活動。
卒業後、雑誌編集部勤務を経て独立。
現在はMotorFan illustrated誌、日経トレンディネットなどに執筆。
著書/共著書/編集協力書
「手にとるようにWindows用語がわかる本」「手にとるようにパソコン用語がわかる本 2004年版」(かんき出版)
「記録型DVD完全マスター2003」「買う!録る!楽しむ!HDD&DVDレコーダー」「PC自作の鉄則!2005」(日経BP社)
「図解雑学・量子コンピュータ」「最新!自動車エンジン技術がわかる本」(ナツメ社)など
TDKは磁性技術で世界をリードする総合電子部品メーカーです
Share この記事を共有する
Recommendedこの記事を見た人はこちらも見ています
テクノ雑学
第157回 スマートフォン躍進の立役者、AndroidとiPhone
テクノ雑学
第158回 冬場の強い味方 〜加湿器もハイブリッド〜

スポーツテック@TDK
アメリカンフットボールの科学:歴史から最新技術まで
PickUp Contents

